|
Karan Baijal I am a recent Masters graduate from Cornell University in Computer Science with a focus in Robotics and Machine Learning. I recieved my undergraduate degree from Cornell University majoring in Physics with double minors in Computer Science and Mechanical Engineering. Driven by intrinsic curiosity, I thrive on continuous learning and hands-on implementation. I love working on challenging problems in collaboration with different teams and individuals, and genuinely enjoy the process of working hard to solve complex problems. My primary professional interests lie in Robotics and Machine Learning. Outside of work, I enjoy playing soccer and basketball, as well as the guitar and piano. I’m also passionate about photography and a voracious reader, with interests ranging from biographies of entrepreneurs to books on technology, physics, philosophy, and fiction. Email / Robotics CV / ML CV / Github |

|
Research |
|
|
CLAMP: Crowdsourcing a LArge-scale in-the-wild haptic dataset with an
open-source device for Multimodal robot Perception
Robotics: Science and Systems , 2025
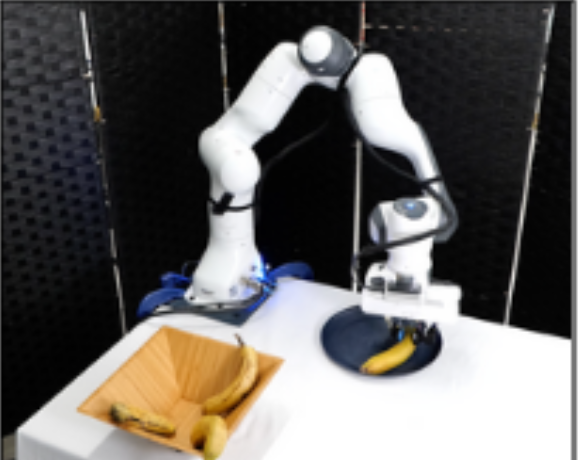
Paper, Github (Private) , Website Developed the largest multimodal haptic dataset in literature. Implemented Transformer and CNN-based multimodal haptic model and fused it with finetuned Vision-Language models (OpenAI CLIP, GPT) to develop a visuo-haptic model for material and compliance recognition. Implemented model on multiple robot manipulators and real-world tasks to show generalization and robustness of model. Achieved significant performance improvement over state-of-the-art models. |
|
RoboChef: Meal-Preperation using Single-arm Robot
(Ongoing Research)
Paper, Github (Private) RoboChef is the first robotic meal-preparation system to seamlessly integrate vegetable cutting and peeling with sandwich assembly, and does so with a single robot-arm. It combines a diffusion-based control policy for precise manipulation, advanced image segmentation for reliable perception, and an LLM-driven planner to orchestrate every step of the sandwich-making process. |

|
AdaTAMP: Adaptive Task and Motion Planning using LLM-Agents
International Conference on Robotics and Automation (ICRA) , 2025
Paper, Github We introduce AdaTAMP, an Adaptive Task and Motion Planning framework that integrates LLM-based task planning with continuous motion planning via a real-time feedback loop, enabling error correction and multi-agent collaboration for embodied agents. AdaTAMP significantly outperforms baseline methods in success rate, planning efficiency, and adaptability, particularly for complex, long-horizon, multi-agent scenarios. Accepted Poster Submission at ICRA: Task and Motion Planning Workshop 2025. |
|
|
Search for inelastic dark matter in events with soft, displaced electrons
and missing transverse momentum
(Ongoing Research)
Paper, Github Trained machine learning models using boosted decision trees to determine feature importance & differentiate Dark matter signal from Standard Model background events during proton-proton collisions in CERN particle collider. Additionally, developed a novel isolation metric to resolve a flaw in CERN’s codebase, improving performance by 15%. Wrote Python and C++ code on Fermilab GPU servers as part of a global, multi-collaborative effort. Aiming to submit paper by June 2025. |
|
Quantum Circuit Development in a two-qubit superconducting architecture
using Machine Learning
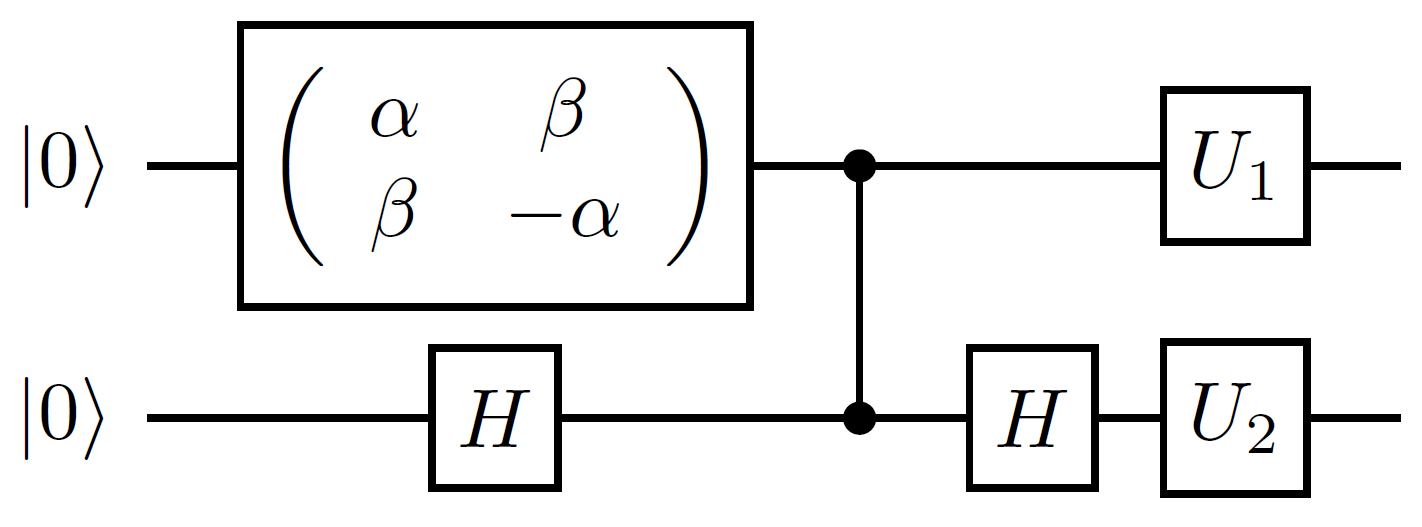
Paper, Github Explored recurrent neural networks and LSTMs for one-shot construction of optimized quantum circuits for arbitrary state preparation on a superconducting qubit architecture. |
Projects |
|
Cornell Autonomous Bike (Autobike) Project Team,
Navigation Team Lead
Github (Coming Soon) Headed 10-member team to develop nagivation framework for self-balancing, self-driving bicycle. Implemented obstacle navigation and path-planning algorithms using ROS and Python. Developed simulation framework using Gazebo and RViz to test algorithms in a virtual environment. Led effort to test codebase on real-world bicycle. |
|
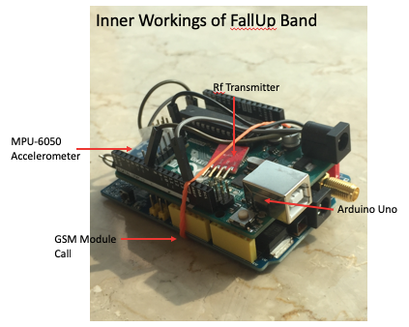
FallUp Medical Device: An Autonomous Fall Detection and Multi-Alert Device
Paper Invented Fallup Healthcare Wearable - an autonomous fall detection and emergency multi-alert wearable for the elderly. |
|
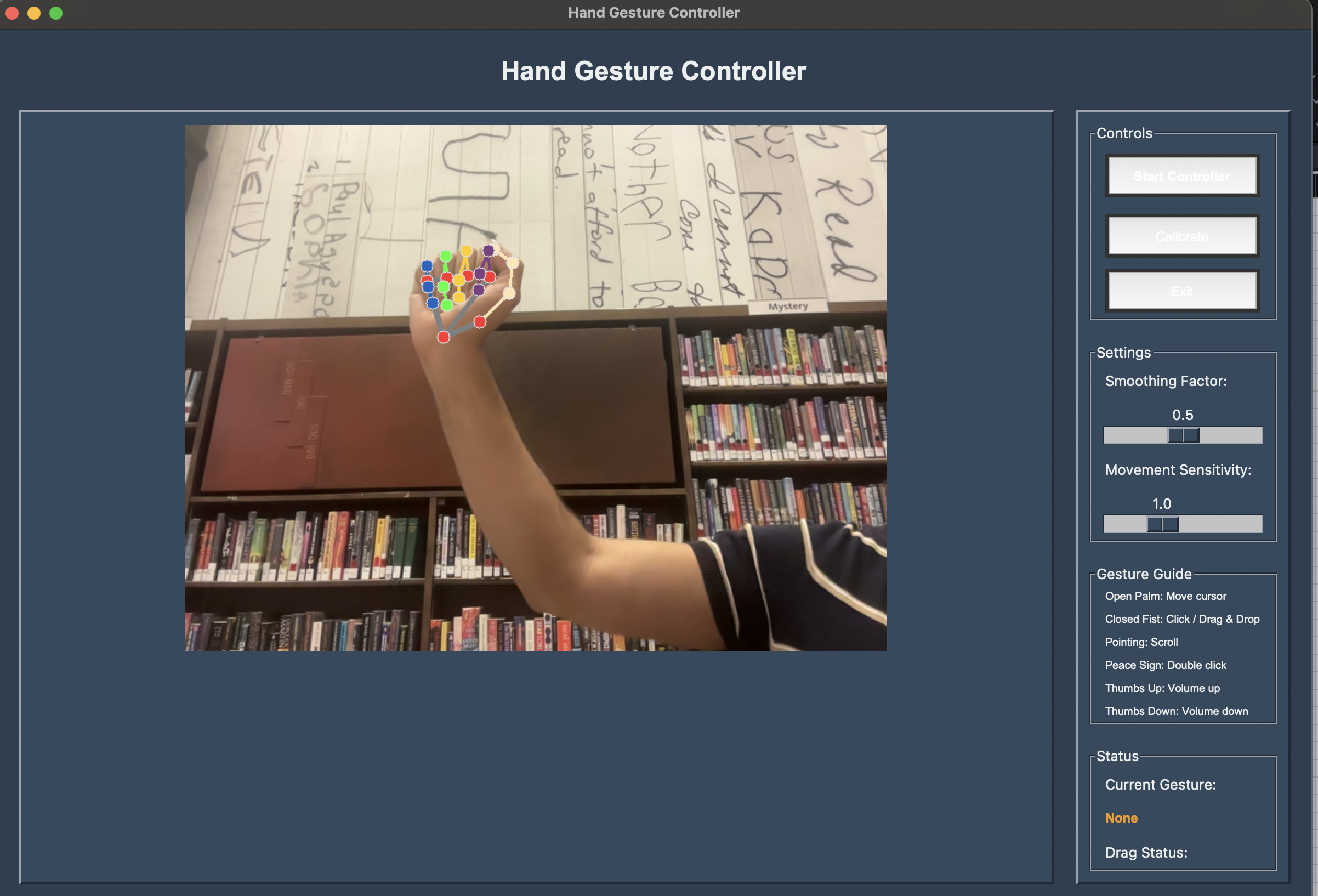
GestureControl: Control computer using hand gestures
Github Developed a hand gesture recognition system using computer vision to control mac computer cursor and perform tasks through gestures. |
|
Moneyball: NBA Trade Machine using Functional Programming
Paper, Github Built an NBA trade machine, with a Graphical User Interface (GUI), that allows the user to experiment with hypothetical trades between NBA teams. This project was implemented entirely using Functional Programming in Ocaml. |
Industry Internships |
.jpg)
|
Corning Incorporated
Engineered computer vision and sensor-based error-proofing system for load-unload of 150lb glass preforms by multi-dimensiona autonomous robots. Designed experimentation methods to test solutions under the factory’s intense physical constraints. My work resolved a longstanding bottleneck for the factory and my team, achieving potential long time cost-savings of upto $1,000,000. |
|
|
Dell Technologies
Developed a product recommendation engine based on user input to understand business needs of small & medium businesses and recommend relevant company products for different use cases. |
|
Website format derived from Jon Barron. |